
构建 DIY 四轴飞行器的第一步是选择合适的框架。
由于各种原因,四轴飞行器是飞行员和制造商中所有多轴飞行器中最受欢迎的。然而,四轴飞行器本身有多种形状和尺寸,每种都有自己的优势和怪癖。
四轴飞行器的框架是安装其他所有东西的底盘。电机、速度控制器、电路板、模块和其他所有东西都安装在框架上。框架的形状表明了电机的配置、它们如何对齐以及它们之间有多少空间。
反过来,这些参数使四旋翼无人机更适合特定用途。在本文中,我们收集了一些最常见的四轴飞行器框架,以帮助您决定应该为 DIY 项目选择哪个框架。
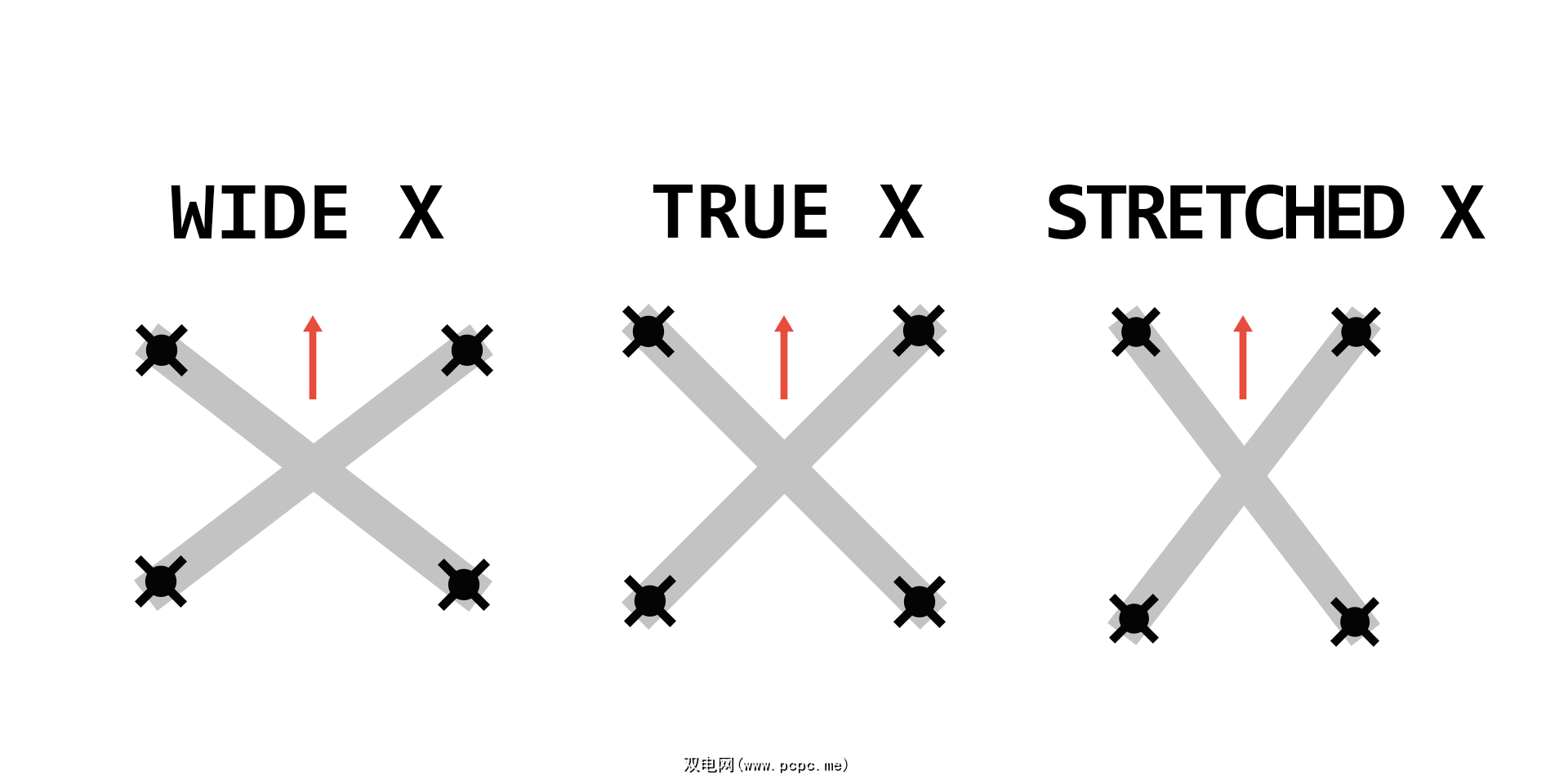
X 框架是 DIY 四轴飞行器最常见的框架。电子设备安装在连接处,电机安装在臂的尖端。在 X 框架的所有变体中,电机在运动和方向上耦合在一起。例如,电机 1 和 2 将无人机向前移动,电机 2 和 3 向右移动,电机 3 和 4 向后移动,电机 4 和 1 向左移动。
这种耦合理论上会降低您对无人机的控制,但意味着更不易损坏,因为如果您将无人机向任何方向坠毁,撞击将被两只手臂而不是一只手臂吸收。
X 框架有三种常见的变体:
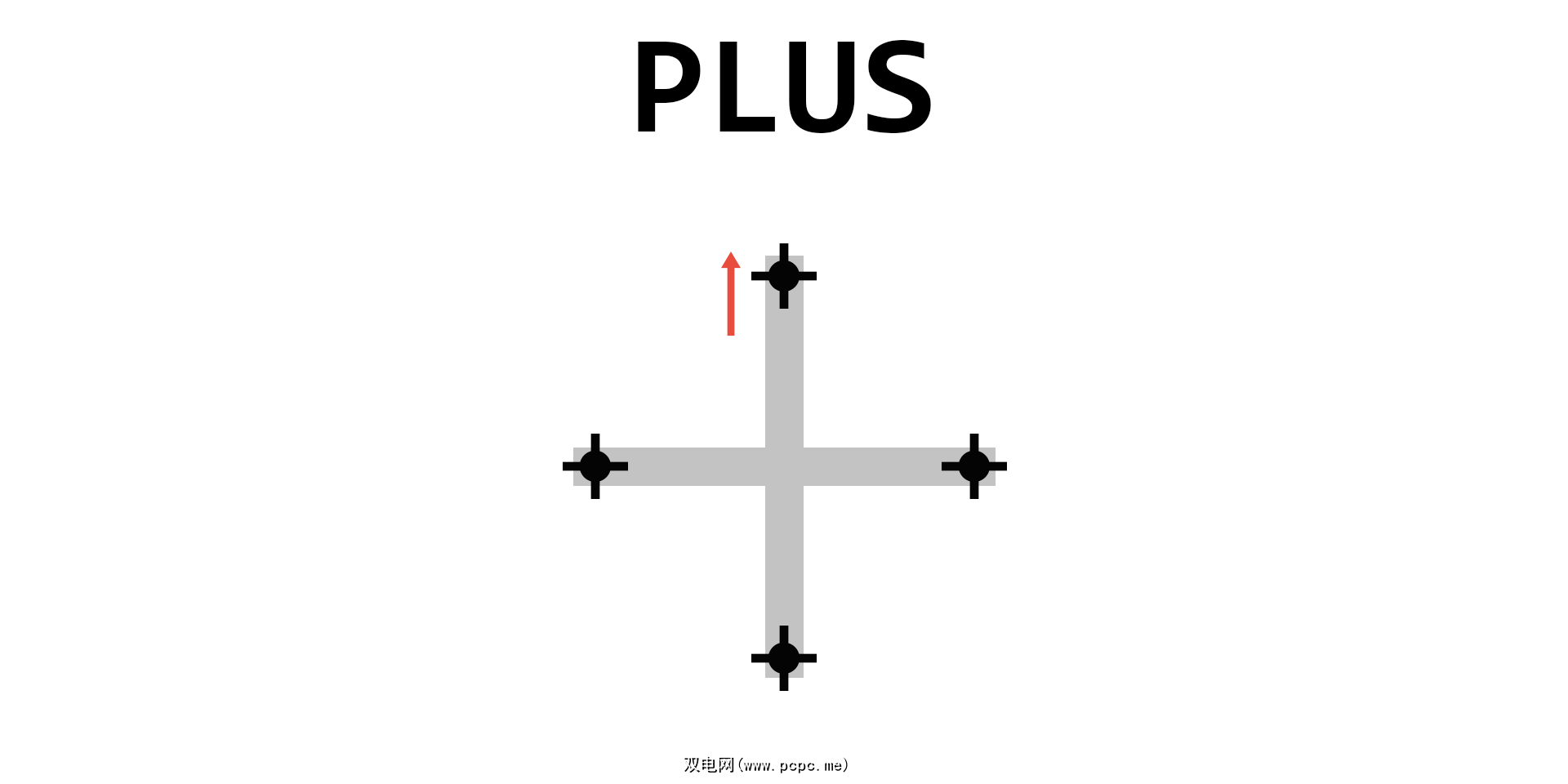
本质上,加号框是一个真正的 X 框,旋转了 45 度。这可能让人觉得两者是一体的,但 45 度旋转意味着每个电机都单独负责一个特定的方向。与电机耦合在一起的 X 型车架不同,在加型车架中,电机 1 为前部,2 为右侧,3 为后部,4 为左侧。没有情侣。
在纸面上,这意味着与 X 帧相比,plus 帧在可操作性和控制方面具有优势。然而,这种优势是以无人机的脆弱性为代价的。如果正面撞毁一个 plus 框架,单臂将吸收撞击,这使得单臂更有可能屈服并折断。
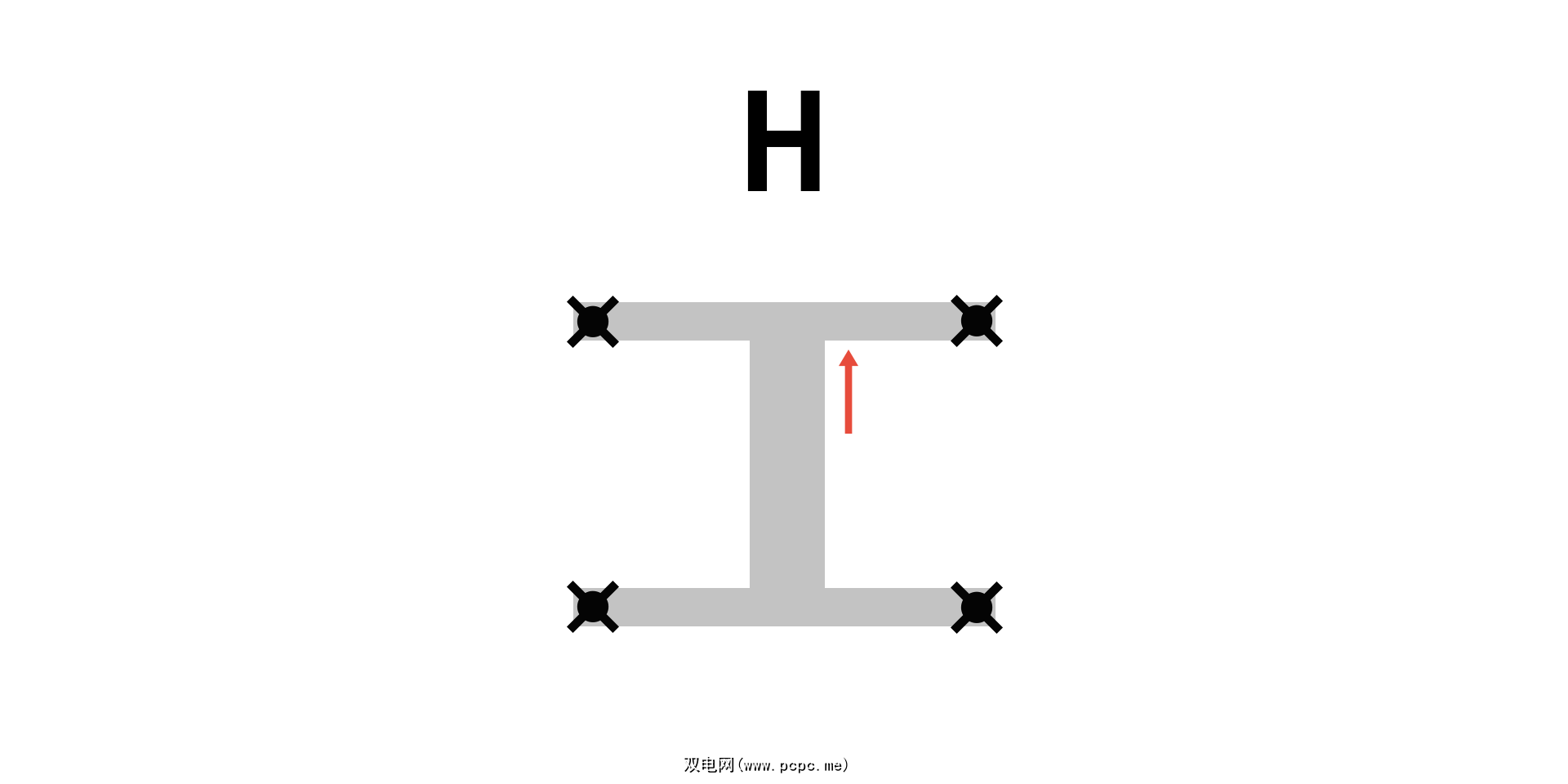
在 H 型框架中,两个平行臂容纳电机,中心部件容纳电子设备。H架在DIY无人机制造商中不如X架受欢迎,因为它的配置相当笨拙,但这并不意味着它没有什么可提供的。一方面,与其他框架相比,H 框架为电子设备提供了更多空间。
在处理方面,H 型车架的几何形状使其在进行特技和 FPV 赛车时不太稳定。相反,H 型车架拥有更耐用的构造,在碰撞中不太可能损坏。
构建你自己的东西并自己做的一部分是你可以决定你到底想要构建什么。现在您了解了不同类型的四轴飞行器框架及其优势,您可以继续选择合适的框架来构建无人机。
在决定您的无人机需要哪种类型的框架后,您可以购买或建造它。自己构建框架的一个好方法是 3D 打印它。