当然,遥控汽车很有趣,但是自动驾驶机器人汽车更有趣。在本教程中,我们将构建一个四轮机器人,该机器人可以四处行驶并避免障碍物。我是从速卖通购买的完整的4WD套件,但是您可以轻松地从电子商店购买这些组件中的大部分并将它们自己组装在一起。
我建议您在开始之前通读所有说明。弄清楚一些可能在第一次使用时会造成混淆的事情。另外,由于说明的篇幅,这看起来可能是一个非常长的高级项目,但实际上非常简单。不必害怕-这是一个初学者级的项目,您可以从中获得一些令人满意的结果,然后在学习更多的基础上继续进行。不喜欢这种机器人吗?这里有一些其他的Arduino机器人,您可以轻松地代替构建。 H桥(向电机供电的卡)到机箱的下部。首先,使用两个长螺栓和两个螺母将四个金属支架(它们是矩形的,钻有金属的金属块)连接到每个电动机。

您需要确保正确安装它们,因此请查看下图,以确保带有两个钻孔的模块侧面朝下。请注意,每个电机上的电线都指向机箱的中心。
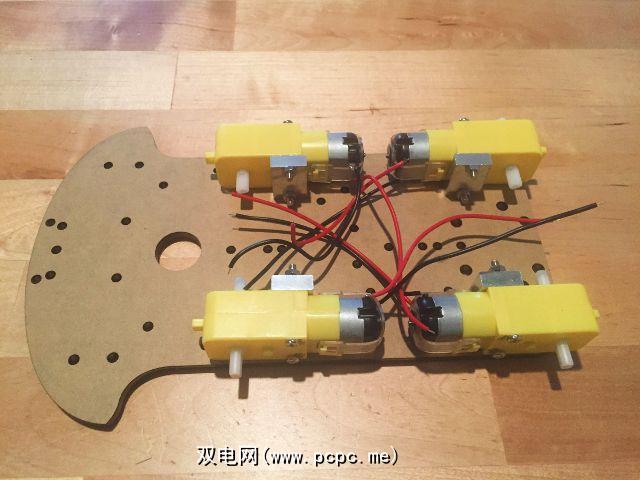
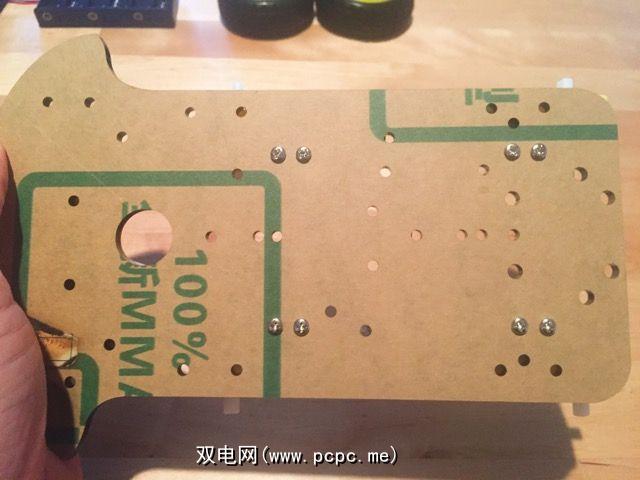
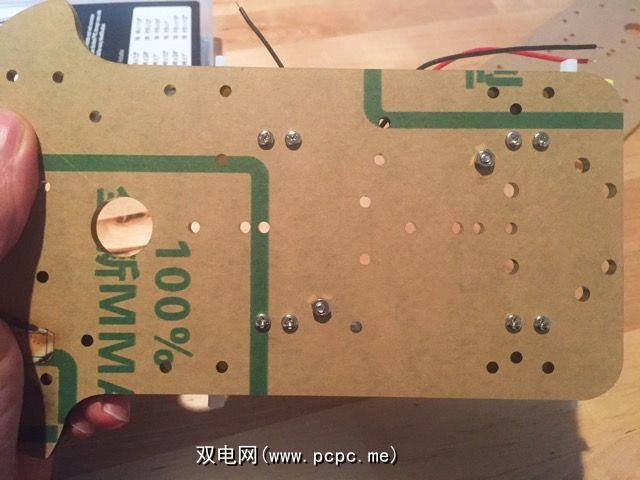
现在,可以使用每个金属支架底部的两个短螺栓将每个电机连接到机箱。这是机箱底部的视图,因此您可以看到螺栓的位置:
下一步是将H桥(在我的套件中为红板)固定至机箱。 。您可能要等到所有电线都连接到H桥之后再执行此操作,但这取决于您(我发现这样比较容易)。快速说明:我的工具包缺少许多紧固件,因此我用电工胶带固定了桥。但是,您可以在此处看到螺栓和螺母的去向:
现在已安装了H桥,您可以开始为电源接线。因为六号AA电池座带有DC适配器,所以您需要切断末端(我这样做了),或者将跳线连接到电池本身。

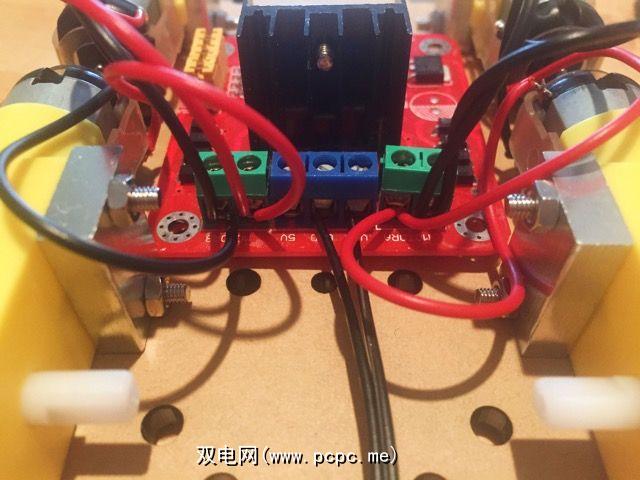
为此,您需要将正极线连接到桥上标有“ VMS"的端口,将负极线连接到桥上标有“ GND"的端口。拧紧紧固件,并确保其牢固。然后,您将连接电动机导线。两侧都有两个端口。一条标记为“ MOTORA",另一条标记为“ MOTORB"。每边的两条红色导线将进入最中间的绿色端口,两条黑色导线将进入最外部。这张图片应该使它更清晰:
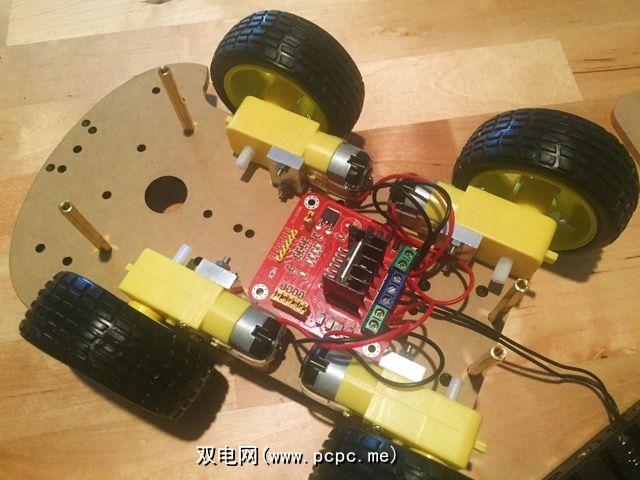
我发现我必须从电动机电线上剥去一些外壳才能使其正常工作。现在您已经将电动机和电源全部连接好,将车轮滑到电动机驱动轴上,并在下图所示的位置安装四个铜轴(每个铜轴需要一个小螺栓)。该机器人开始成形!
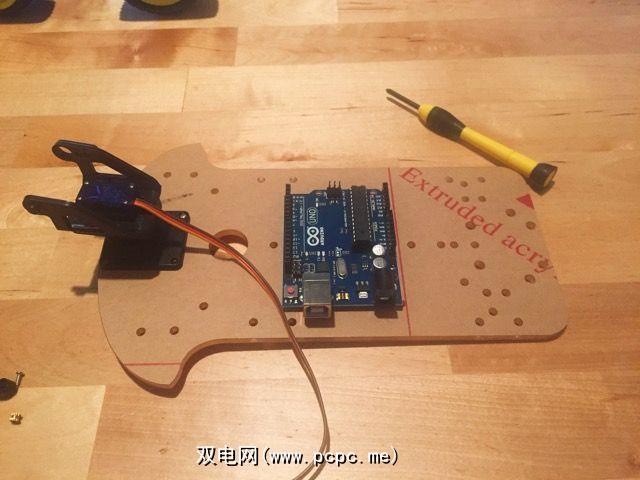
现在,将机箱的那一部分放在一边,然后抓住另一个将放在上面的机器人。下一步是连接Arduino,同样,我必须使用电工胶带,但是您应该能够使用一些螺栓和螺母更好地固定自己。

下一步需要微型伺服器,黑色横档,伺服支架(由三个黑色塑料块组成)和一些小螺钉。使用工具包中较大的尖头螺钉之一将黑色横档固定到微型伺服器上:

然后将伺服器上下翻转到支架的黑色塑料环中。确保从伺服器引出的电线与支架的较长部分朝向相同的方向(再次参见下图),并使用四个细小的螺钉固定横杆(支架上有四个孔,

最后,取下另外两片伺服支架,将其卡入卡口中。
伺服器(在侧件上有与伺服器上的塑料卡舌匹配的凹槽)。

现在伺服器支架已经完成,可以将其安装到机箱上。
这是螺栓要去的地方:

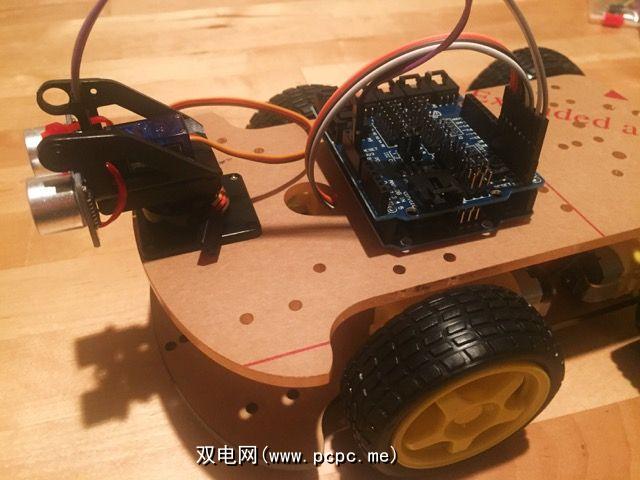
是时候给我们的机器人一些眼睛了。使用两个拉链将超声波传感器连接到伺服器支架上。

如果您使用的是与我相同的套件,则将收到Arduino传感器护罩。我们不会在此版本中使用它,但是您可以根据需要立即将其弹出UNO上方(如下图所示)。只需将屏蔽底部的引脚与Arduino上的I / O端口对齐,然后按下即可将其连接。您现在不需要它,但是可以使用屏蔽罩。

无论是否连接传感器屏蔽罩,现在都需要四根电线将超声传感器连接到Arduino。传感器上有四个引脚:VCC,GND,TRIG和ECHO。将VCC连接至Arduino的5V引脚,将GND连接至GND,将TRIG和ECHO连接至I / O引脚12和13。
现在抓住机箱的下部,并将六根跳线连接至H桥的I / O引脚(标记为ENA,IN1,IN2,IN3,IN4和ENB)。请注意,稍后将需要知道哪些色线连接到了哪些端口。
现在是时候开始将这些东西放在一起了。抓住机箱的上部,将其放在连接到下部的铜轴上,然后将H桥上连接的电线穿过机箱中心的孔。如下所示将六根线连接到I / O端口:
现在,使用四个短螺钉将机箱的上部连接到铜轴上。将六节AA电池座放在机箱顶部(如果可能的话,将其向下拧),将9V电池座连接到Arduino,此机器人就可以晃动了!
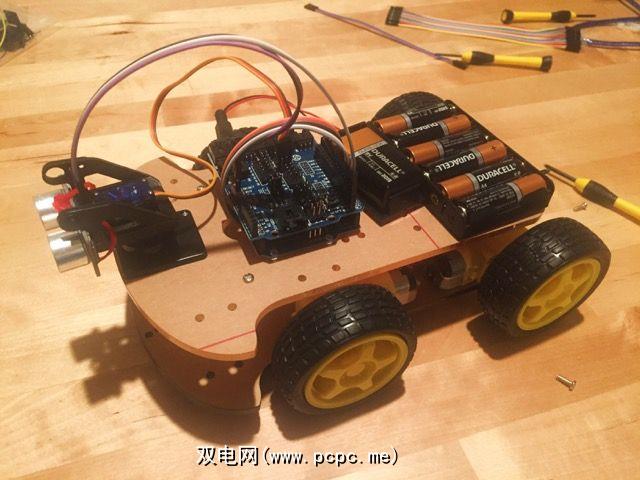
好了,准备好了摇滚。还没有足够的个性。
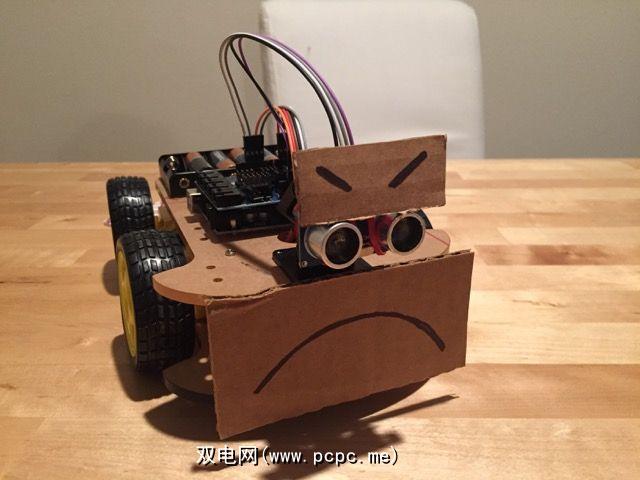
我们去了。现在给它一个大脑。让我们做一些编程。
我们要做的第一件事是进行测试,以确保正确连接了电桥和电动机。这是一个快速草图,它会告诉机器人前进半秒,向后退半秒,然后左右旋转:
用于简单测试的很多代码,但是定义了所有代码这些功能中的一个使得以后进行调整变得更容易。 (非常感谢Billwaa的博客文章,其中介绍了使用H桥定义这些功能的方法。)如果出了点问题,请检查所有连接并将电线连接到正确的引脚上。如果一切正常,是时候进行传感器测试了。要使用超声波传感器,您需要下载NewPing库,然后使用草图>包含库>添加.ZIP库…加载库。
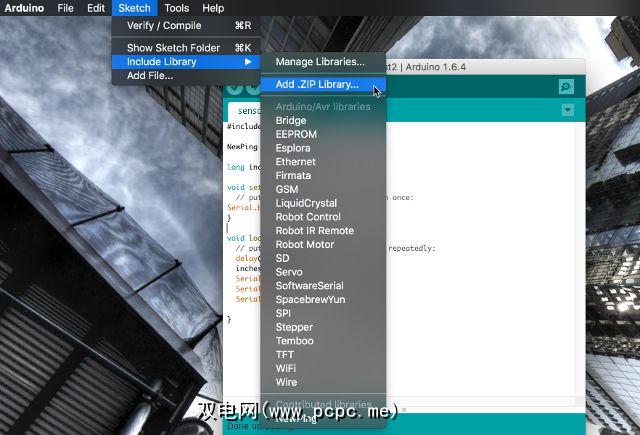
制作确保您在草图的顶部看到include语句;如果不是,请点击素描>包含库> NewPing 。完成此操作后,加载以下草图:
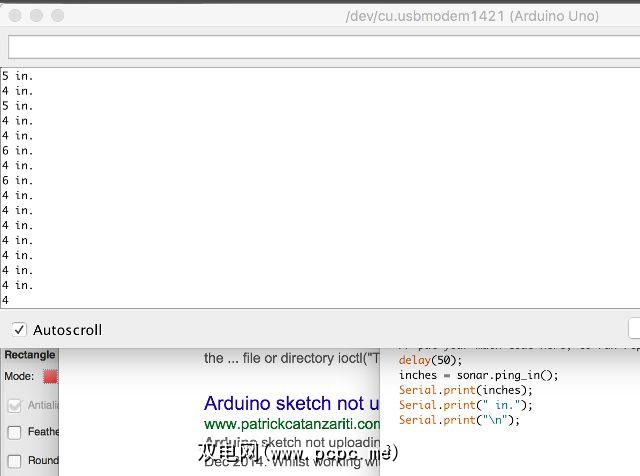
上传草图,然后使用工具>串行监视器打开串行监视器。您应该看到快速更新的数字序列。把手放在传感器前面,然后查看该数字是否发生变化。将手移入和移出,应该可以测量出手距传感器的距离。
如果一切正常,是时候将它们放在一起并让它运行了!这是现在的机器人代码。您可能会说,这基本上是两个测试草图以及一个添加的if语句,用于控制机器人的行为。我们为它提供了一个非常简单的避障行为:如果发现距离不足四英寸的东西,它将后备,向左转并再次开始移动。这是正在运行的机器人的视频。
赋予机器人一些生命
一旦这种行为正常发挥,您就可以添加更复杂的行为;使机器人在左右旋转之间交替,或随机选择;如果接近某物,则发出蜂鸣声;只是转身,而不是备份;您实际上仅受您的想象力限制。您可以在Arduino入门套件中几乎使用任何东西来添加更多功能。您还会注意到,我们还没有为伺服器编码任何东西:实际上,您可以使机器人的“眼睛"来回移动。也许是用它们来寻找路径,而不是每当它在前方直接发现障碍物时就立即备份。
让我们知道您是决定建造该机器人还是其他机器人,并告诉我们您如何决定自定义其行为或外观。 如果您对此机器人有任何疑问,请在下面的评论中发布,我会帮忙的!